%matplotlib inline
%config InlineBackend.figure_format = 'retina'
%gui qt
import time
time.sleep(5)
Segmentation¶
Separating an image into one or more regions of interest.¶
Everyone has heard or seen Photoshop or a similar graphics editor take a person from one image and place them into another. The first step of doing this is identifying where that person is in the source image.
In popular culture, the Terminator’s vision segments humans out of the overall scene:

Segmentation is a fundamental operation in scientific image analysis because we often want to measure properties of real, physical objects such as cells embedded in our image. As such, we want to find those objects within our image.
Computationally, segmentations are most often represented as images, of the same size as the original image, containing integer labels, with one value representing one object.
Here is a very simple image and segmentation, taken from this scikit-image tutorial:
import numpy as np
from scipy import ndimage as ndi
import napari
from skimage.segmentation import watershed
from skimage.feature import peak_local_max
# Generate an initial image with two overlapping circles
x, y = np.indices((80, 80))
x1, y1, x2, y2 = 28, 28, 44, 52
r1, r2 = 16, 20
mask_circle1 = (x - x1)**2 + (y - y1)**2 < r1**2
mask_circle2 = (x - x2)**2 + (y - y2)**2 < r2**2
image = np.logical_or(mask_circle1, mask_circle2)
# Now we want to separate the two objects in image
# Generate the markers as local maxima of the distance to the background
distance = ndi.distance_transform_edt(image)
coords = peak_local_max(distance, footprint=np.ones((3, 3)), labels=image)
mask = np.zeros(distance.shape, dtype=bool)
mask[tuple(coords.T)] = True
markers, _ = ndi.label(mask)
labels = watershed(-distance, markers, mask=image)
viewer = napari.Viewer()
image_layer = viewer.add_image(image)
labels_layer = viewer.add_labels(labels)
labels_as_image_layer = viewer.add_image(
labels, name='labels as image'
)
Notice that “labels” is just a NumPy array with integer values. We have to be careful to interpret it as labels and not as an image.
Segmenting nuclei and measuring cell properties¶
In the rest of this notebook, we will segment nuclei from a small sample image provided by the Allen Institute for Cell Science.
import tifffile
nuclei = tifffile.imread('../images/cells.tif')
membranes = tifffile.imread('../images/cells_membrane.tif')
print("shape: {}".format(nuclei.shape))
print("dtype: {}".format(nuclei.dtype))
print("range: ({}, {})".format(np.min(nuclei), np.max(nuclei)))
shape: (60, 256, 256)
dtype: float64
range: (0.0, 1.0)
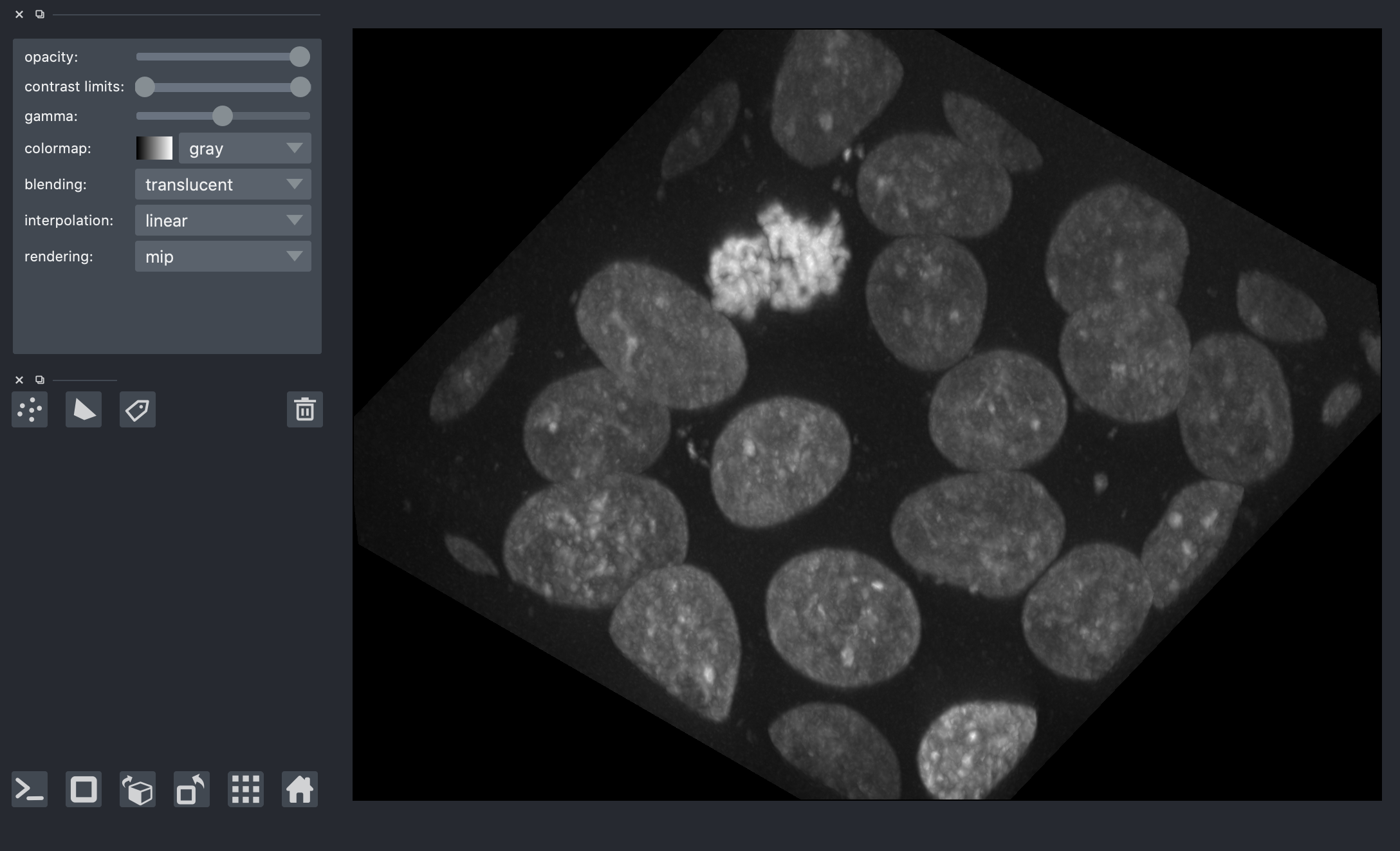
The pixel spacing in this dataset is 0.29µm in the z (leading!) axis, and 0.26µm in the x and y axes.
spacing = np.array([0.29, 0.26, 0.26])
We can view the 3D image using napari.
viewer = napari.view_image(
nuclei,
contrast_limits=[0, 1],
scale=spacing,
ndisplay=3,
)
from napari.utils.notebook_display import nbscreenshot
viewer.dims.ndisplay = 3
viewer.camera.angles = (-30, 25, 120)
nbscreenshot(viewer)
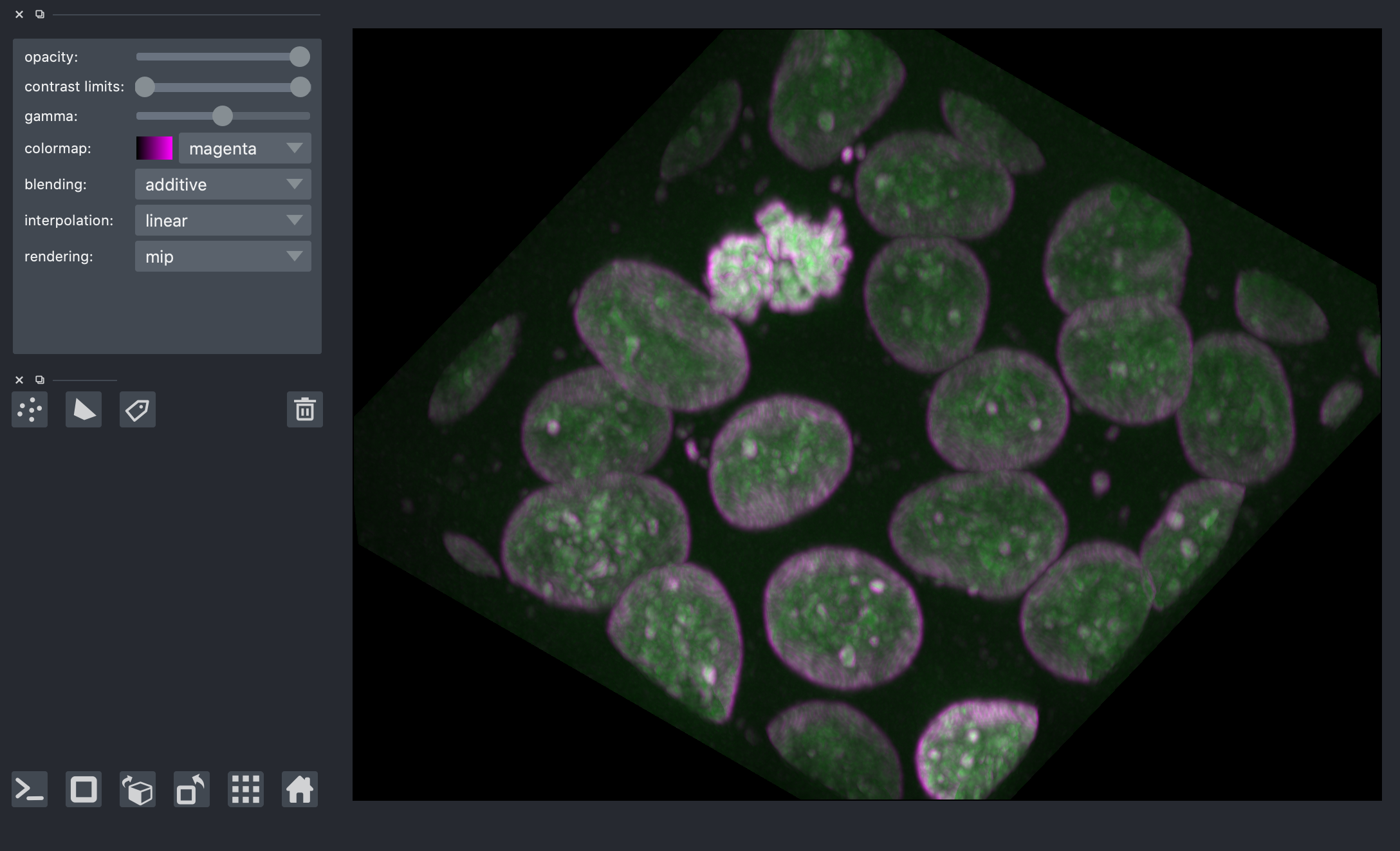
Edge detection¶
We saw the Sobel operator in the filters lesson. It is an edge detection algorithm that approximates the gradient of the image intensity, and is fast to compute. The Scharr filter is a slightly more sophisticated version, with smoothing weights [3, 10, 3]. Both work for n-dimensional images in scikit-image.
from skimage import filters
edges = filters.scharr(nuclei)
nuclei_layer = viewer.layers['nuclei']
nuclei_layer.blending = 'additive'
nuclei_layer.colormap = 'green'
viewer.add_image(
edges,
scale=spacing,
blending='additive',
colormap='magenta',
)
<Image layer 'edges' at 0x7f97c34556d0>
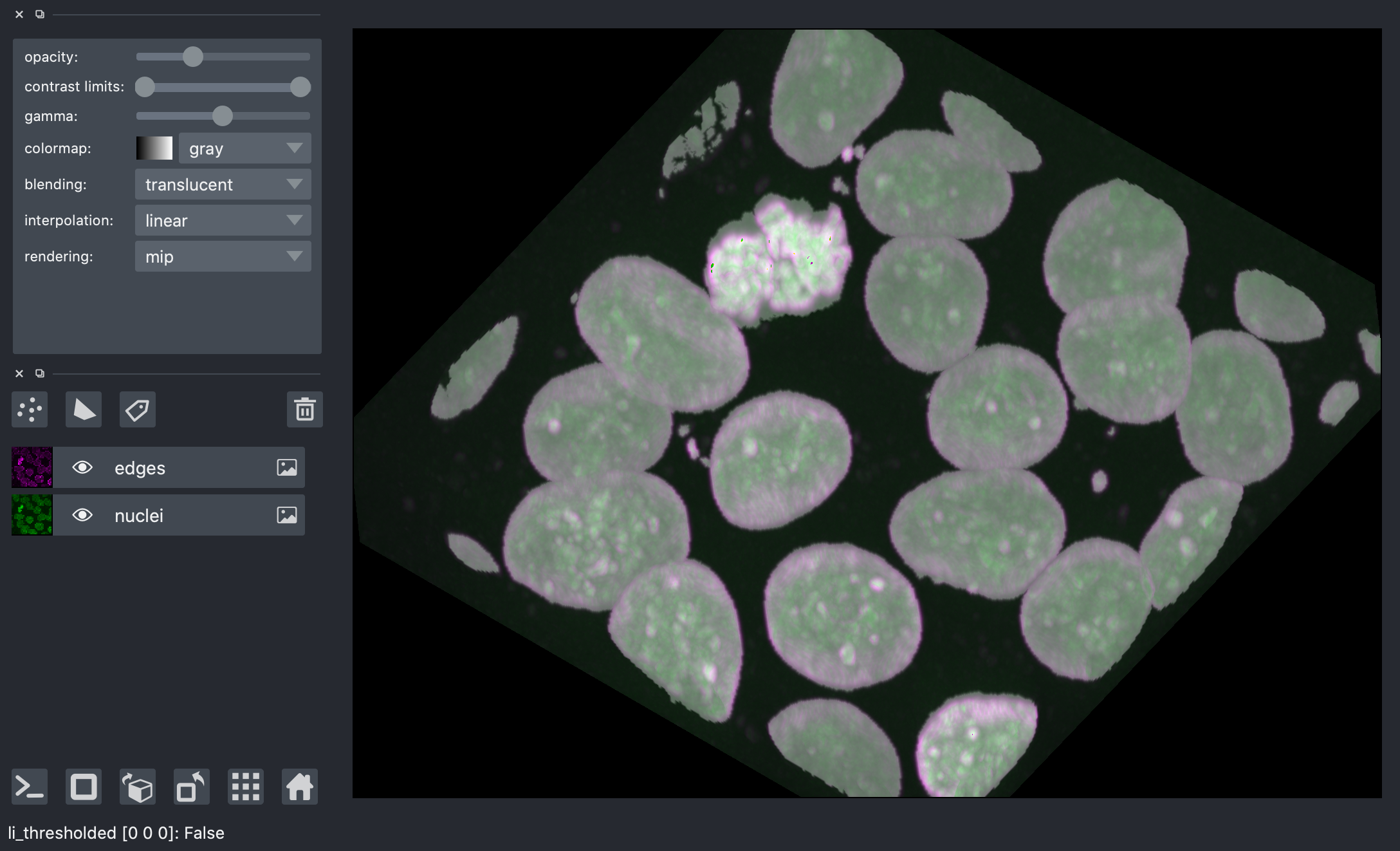
Thresholding¶
Thresholding is used to create binary images. A threshold value determines the intensity value separating foreground pixels from background pixels. Foregound pixels are pixels brighter than the threshold value, background pixels are darker. In many cases, images can be adequately segmented by thresholding followed by labelling of connected components, which is a fancy way of saying “groups of pixels that touch each other”.
Different thresholding algorithms produce different results. Otsu’s method and Li’s minimum cross entropy threshold are two common algorithms. Below, we use Li. You can use skimage.filters.threshold_<TAB> to find different thresholding methods.
denoised = ndi.median_filter(nuclei, size=3)
li_thresholded = denoised > filters.threshold_li(denoised)
viewer.add_image(
li_thresholded,
scale=spacing,
opacity=0.3,
)
<Image layer 'li_thresholded' at 0x7f97b7b119d0>
nbscreenshot(viewer)
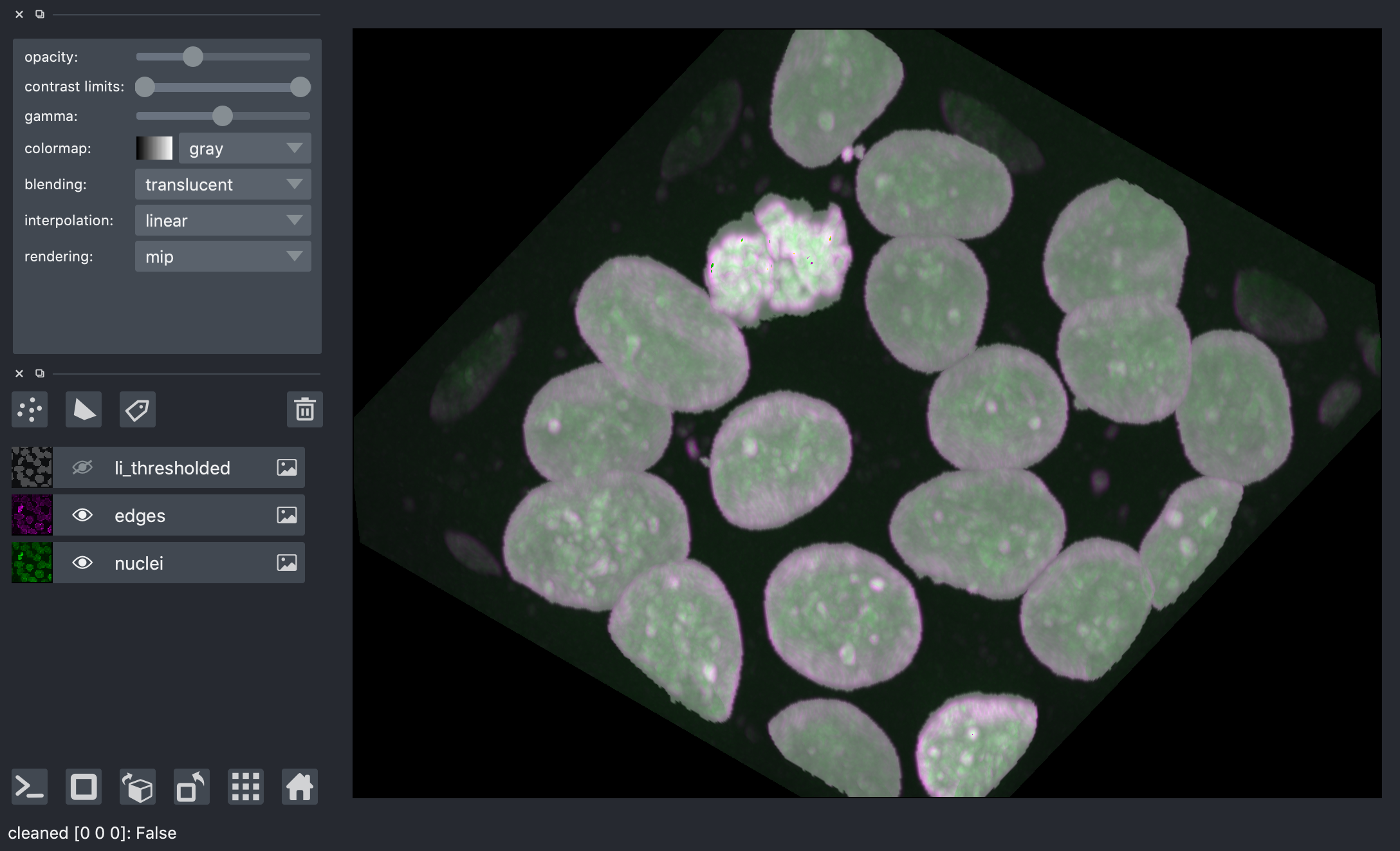
Morphological operations¶
Mathematical morphology operations and structuring elements are defined in skimage.morphology. Structuring elements are shapes which define areas over which an operation is applied. The response to the filter indicates how well the neighborhood corresponds to the structuring element’s shape.
There are a number of two and three dimensional structuring elements defined in skimage.morphology. Not all 2D structuring element have a 3D counterpart. The simplest and most commonly used structuring elements are the disk/ball and square/cube.
Functions operating on connected components can remove small undesired elements while preserving larger shapes.
skimage.morphology.remove_small_holes fills holes and skimage.morphology.remove_small_objects removes bright regions. Both functions accept a size parameter, which is the minimum size (in pixels) of accepted holes or objects. It’s useful in 3D to think in linear dimensions, then cube them. In this case, we remove holes / objects of the same size as a cube 20 pixels across.
from skimage import morphology
width = 20
remove_holes = morphology.remove_small_holes(
li_thresholded, width ** 3
)
width = 20
remove_objects = morphology.remove_small_objects(
remove_holes, width ** 3
)
viewer.add_image(
remove_objects,
name='cleaned',
scale=spacing,
opacity=0.3,
);
viewer.layers['li_thresholded'].visible = False
nbscreenshot(viewer)
Segmentation¶
Now we are ready to label the connected components of this image.
from skimage import measure
labels = measure.label(remove_objects)
viewer.add_labels(
labels,
scale=spacing,
opacity=0.5,
)
viewer.layers['cleaned'].visible = False
nbscreenshot(viewer)
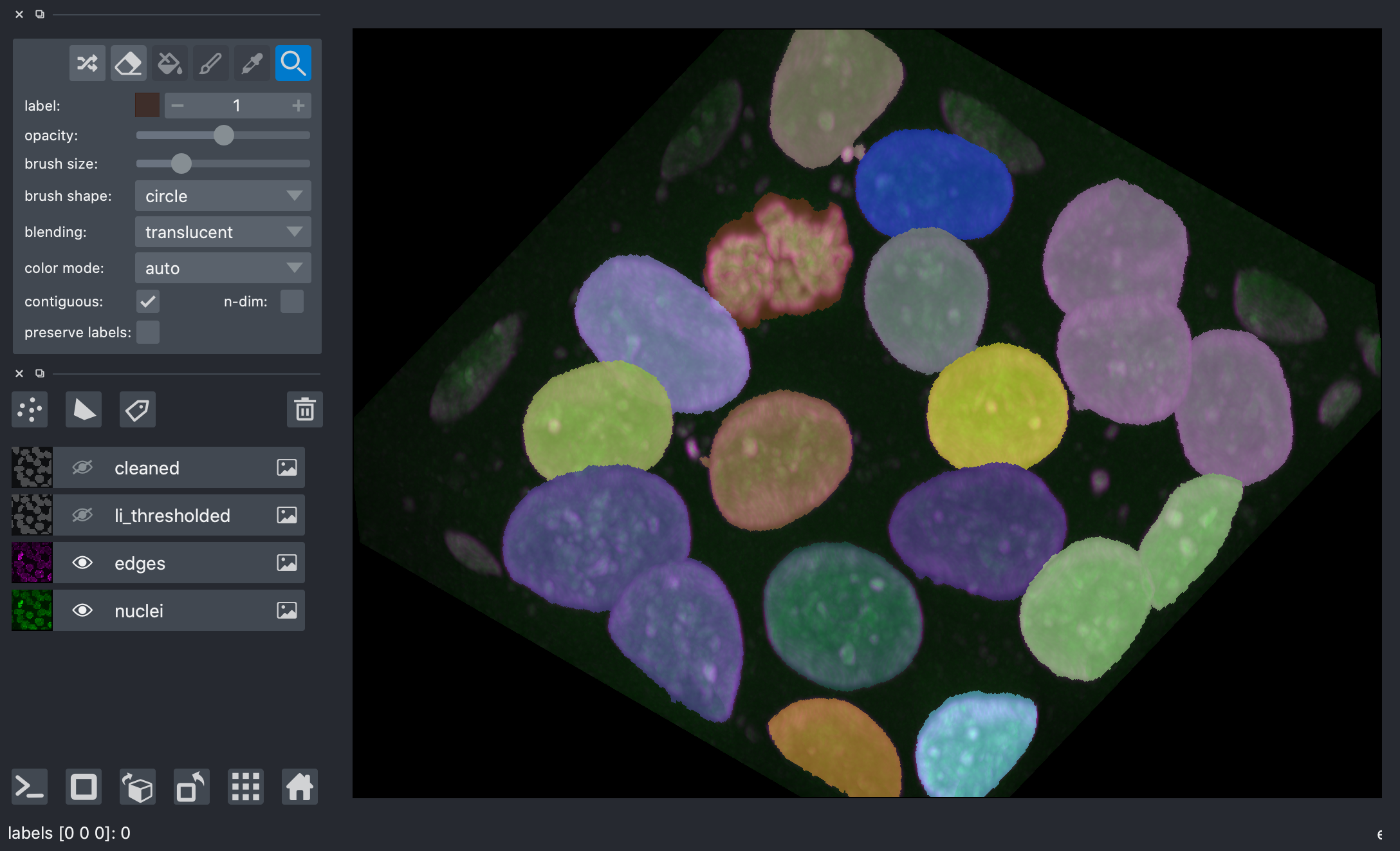
We can see that tightly packed cells connected in the binary image are assigned the same label.
A better segmentation would assign different labels to different nuclei.
Typically we use watershed segmentation for this purpose. We place markers at the centre of each object, and these labels are expanded until they meet an edge or an adjacent marker.
The trick, then, is how to find these markers. It can be quite challenging to find markers with the right location. A slight amount of noise in the image can result in very wrong point locations. Here is a common approach: find the distance from the object boundaries, then place points at the maximal distance.
transformed = ndi.distance_transform_edt(remove_objects, sampling=spacing)
maxima = morphology.local_maxima(transformed)
viewer.add_points(
np.transpose(np.nonzero(maxima)),
name='bad points',
scale=spacing,
size=4,
n_dimensional=True, # points have 3D "extent"
)
<Points layer 'bad points' at 0x7f97c3455670>
nbscreenshot(viewer)
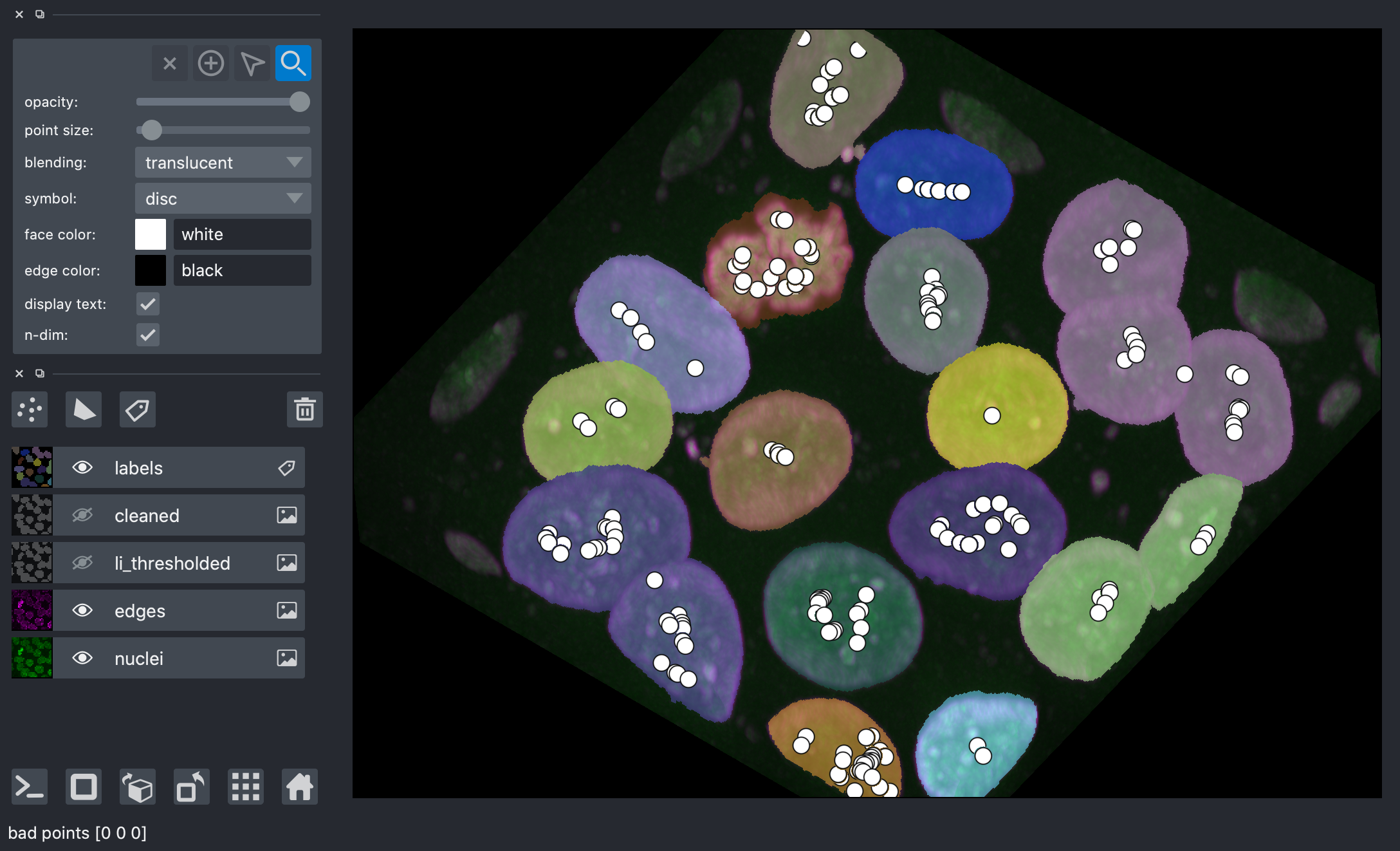
You can see that these points are actually terrible, with many markers found within each nuclei.
Exercise: improve the points¶
Try to improve the segmentation to assign one point for each nucleus. Some ideas:
use a smoothed version of the nuclei image directly
smooth the distance map
use morphological operations to smooth the surface of the nuclei to ensure that they are close to spherical
use peak_local_max with
min_distanceparameter instead ofmorphology.local_maximafind points on a single plane, then prepend the plane index to the found coordinates
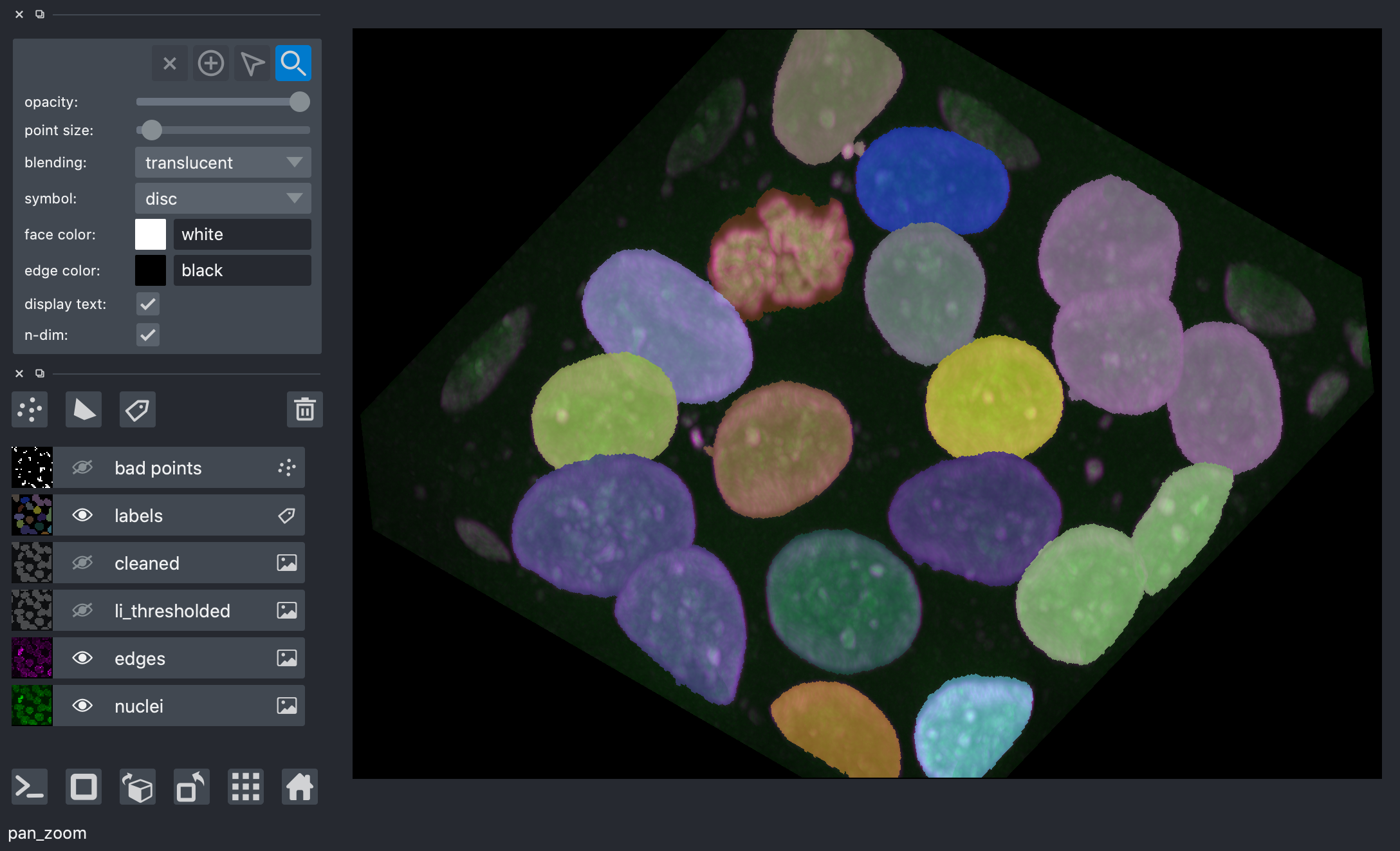
As you will have seen from the previous exercise, there are many approaches to find better seed points, but they are often fiddly and tedious, and sensitive to parameters — when you encounter a new image, you might have to start all over again!
With napari, in many cases, a little interactivity, combined with the segmentation algorithms in scikit-image and elsewhere, can quickly get us the segmentation we want.
Below, you can use full manual annotation, or light editing of the points you found automatically.
viewer.layers['bad points'].visible = False
viewer.dims.ndisplay = 2
viewer.dims.set_point(0, 30 * spacing[0])
points = viewer.add_points(
name='interactive points',
scale=spacing,
ndim=3,
size=4,
n_dimensional=True,
)
points.mode = 'add'
# now, we annotate the centers of the nuclei in your image
Once you have marked all the points, you can grab the data back, and make a markers image for skimage.segmentation.watershed:
from skimage import segmentation
marker_locations = points.data
markers = np.zeros(nuclei.shape, dtype=np.uint32)
marker_indices = tuple(np.round(marker_locations).astype(int).T)
markers[marker_indices] = np.arange(len(marker_locations)) + 1
markers_big = morphology.dilation(markers, morphology.ball(5))
segmented = segmentation.watershed(
edges,
markers_big,
mask=remove_objects,
)
viewer.add_labels(
segmented,
scale=spacing,
)
viewer.layers['labels'].visible = False
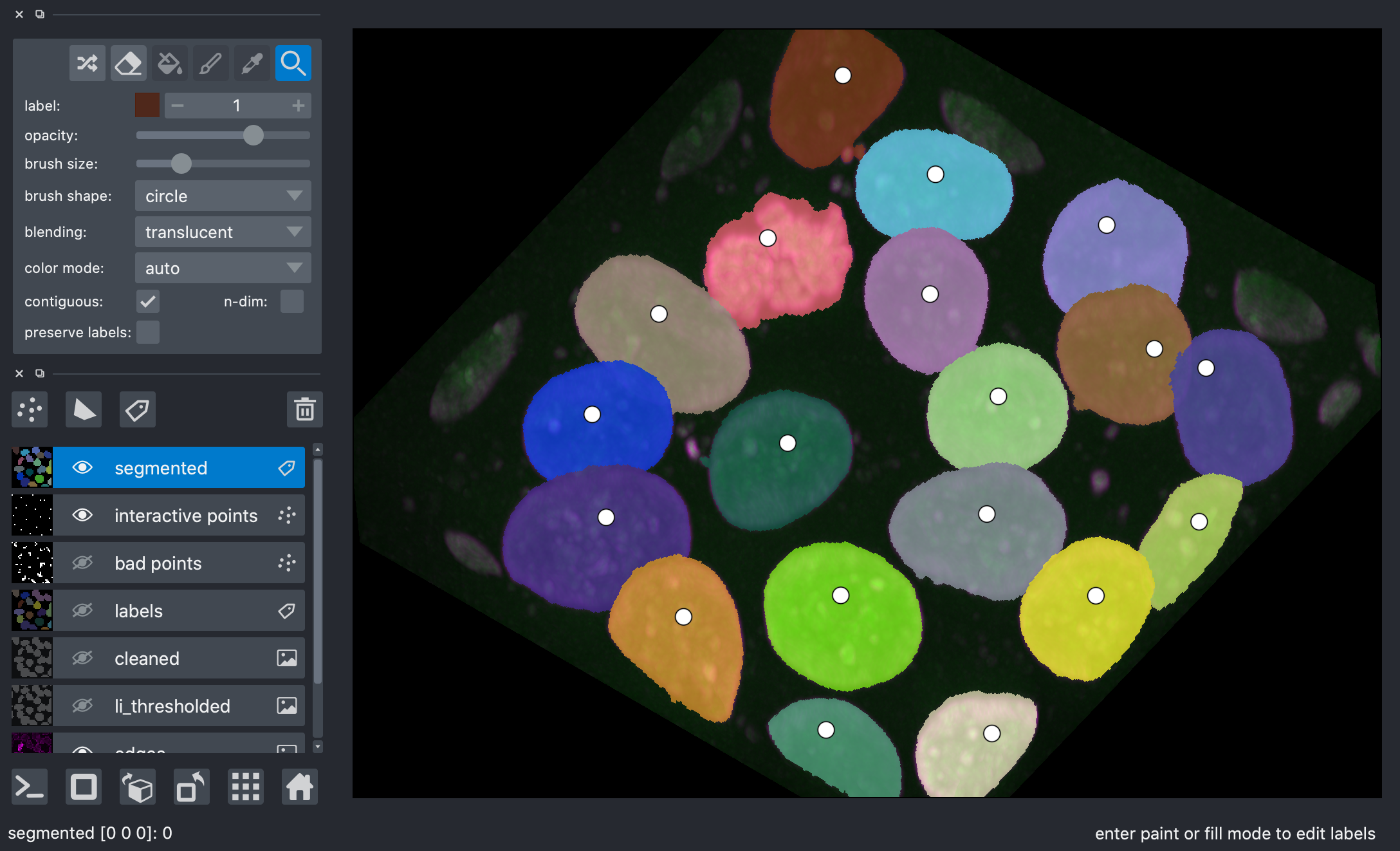
After watershed, we have better disambiguation between internal cells!
Making measurements¶
Once we have defined our objects, we can make measurements on them using skimage.measure.regionprops and the new skimage.measure.regionprops_table. These measurements include features such as area or volume, bounding boxes, and intensity statistics.
Before measuring objects, it helps to clear objects from the image border. Measurements should only be collected for objects entirely contained in the image.
Given the layer-like structure of our data, we only want to clear the objects touching the sides of the volume, but not the top and bottom, so we pad and crop the volume along the 0th axis to avoid clearing the mitotic nucleus.
segmented_padded = np.pad(
segmented,
((1, 1), (0, 0), (0, 0)),
mode='constant',
constant_values=0,
)
interior_labels = segmentation.clear_border(segmented_padded)[1:-1]
skimage.measure.regionprops automatically measures many labeled image features. Optionally, an intensity_image can be supplied and intensity features are extracted per object. It’s good practice to make measurements on the original image.
Not all properties are supported for 3D data. Below we build a list of supported and unsupported 3D measurements.
regionprops = measure.regionprops(interior_labels, intensity_image=nuclei)
supported = []
unsupported = []
for prop in regionprops[0]:
try:
regionprops[0][prop]
supported.append(prop)
except NotImplementedError:
unsupported.append(prop)
print("Supported properties:")
print(" " + "\n ".join(supported))
print()
print("Unsupported properties:")
print(" " + "\n ".join(unsupported))
Supported properties:
area
bbox
bbox_area
centroid
convex_area
convex_image
coords
equivalent_diameter
euler_number
extent
filled_area
filled_image
image
inertia_tensor
inertia_tensor_eigvals
intensity_image
label
local_centroid
major_axis_length
max_intensity
mean_intensity
min_intensity
minor_axis_length
moments
moments_central
moments_normalized
slice
solidity
weighted_centroid
weighted_local_centroid
weighted_moments
weighted_moments_central
weighted_moments_normalized
Unsupported properties:
eccentricity
moments_hu
orientation
perimeter
weighted_moments_hu
scikit-image 0.18 adds support for passing custom functions for region properties as extra_properties. After this tutorial, you might want to try it out to determine the surface area of the nuclei or cells!
skimage.measure.regionprops ignores the 0 label, which represents the background.
regionprops_table returns a dictionary of columns compatible with creating a pandas dataframe of properties of the data:
import pandas as pd
info_table = pd.DataFrame(
measure.regionprops_table(
interior_labels,
intensity_image=nuclei,
properties=['label', 'slice', 'area', 'mean_intensity', 'solidity'],
)
).set_index('label')
info_table.head()
| slice | area | mean_intensity | solidity | |
|---|---|---|---|---|
| label | ||||
| 2 | (slice(20, 53, None), slice(13, 55, None), sli... | 37410 | 0.189264 | 0.930666 |
| 4 | (slice(19, 55, None), slice(26, 71, None), sli... | 36054 | 0.211766 | 0.922923 |
| 5 | (slice(20, 52, None), slice(23, 75, None), sli... | 36993 | 0.181161 | 0.913002 |
| 6 | (slice(19, 54, None), slice(72, 121, None), sl... | 40130 | 0.211141 | 0.894242 |
| 7 | (slice(19, 51, None), slice(47, 99, None), sli... | 40504 | 0.185613 | 0.911985 |
We can now use pandas and seaborn for some analysis!
import seaborn as sns
sns.scatterplot(x='area', y='solidity', data=info_table, hue='mean_intensity');
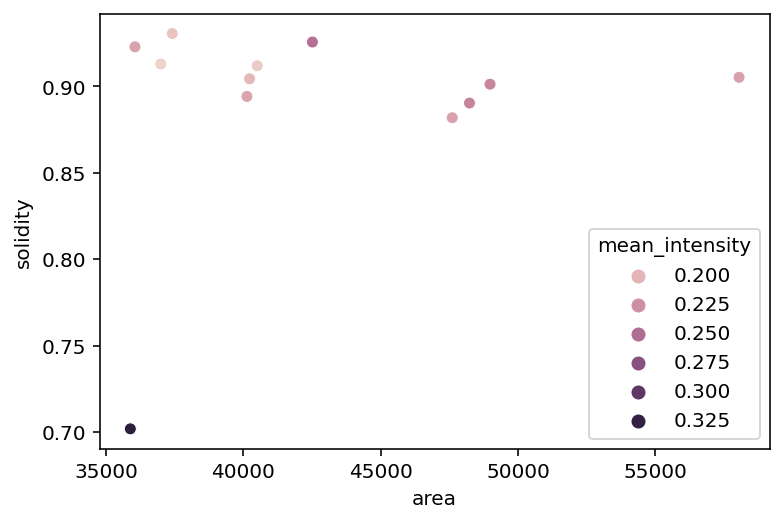
We can see that the mitotic nucleus is a clear outlier from the others in terms of solidity and intensity.
Exercise: physical measurements¶
The “area” property above is actually the volume of the region, measured in voxels. Add a new column to your dataframe, 'area_um3', containing the volume in µm³.
Exercise: full cell segmentation¶
Above, we loaded the membranes image into memory, but we have yet to use it.
Add the membranes to the image.
Use watershed to segment the full cells, and add the segmentation to the display
Exercise: displaying regionprops (or other values)¶
Now that you have segmented cells, (or even with just the nuclei), use skimage.util.map_array to display a volume of the value of a regionprop (say, ‘solidity’ of the cells) on top of the segments.